Шим-контроллер
Содержание:
- Принцип работы ШИМ
- Импульсные источники питания
- От коэффициента заполнения к аналоговому напряжению
- Основы импульсного преобразования
- ШИМ – широтно-импульсная модуляция
- Обзор типичных схем
- ШИМ контроллер: принцип работы
- Принцип шим-регулятора
- Принцип действия ШИМ
- Генератор ШИМ сигнала с изменением скважности
- Системы управления микросхемами
- Как работает инвертор?
- Когда вам не хватает ЦАП
Принцип работы ШИМ
Сигнал, промодулированный по ширине импульса, формируется двумя способами:
- аналоговым;
- цифровым.
При аналоговом способе создания ШИМ-сигнала несущая в виде пилообразного или треугольного сигнала подается на инвертирующий вход компаратора, а информационный – на неинвертирующий. Если мгновенный уровень несущей выше модулирующего сигнала, то на выходе компаратора ноль, если ниже – единица. На выходе получается дискретный сигнал с частотой, соответствующей частоте несущего треугольника или пилы, и длиной импульса, пропорциональной уровню модулирующего напряжения.
В качестве примера приведена модуляция по ширине импульса треугольного сигнала линейно-возрастающим. Длительность выходных импульсов пропорциональна уровню выходного сигнала.
Аналоговые ШИМ-контроллеры выпускаются и в виде готовых микросхем, внутри которых установлен компаратор и схема генерации несущей. Имеются входы для подключения внешних частотозадающих элементов и подачи информационного сигнала. С выхода снимается сигнал, управляющий мощными внешними ключами. Также имеются входы для обратной связи – они нужны для поддержания установленных параметров регулирования. Такова, например, микросхема TL494. Для случаев, когда мощность потребителя относительно невелика, выпускаются ШИМ-контроллеры со встроенными ключами. На ток до 3 ампер рассчитан внутренний ключ микросхемы LM2596.
Цифровой способ осуществляется применением специализированных микросхем или микропроцессоров. Длина импульса регулируется внутренней программой. Во многих микроконтроллерах, включая популярные PIC и AVR, «на борту» имеется встроенный модуль для аппаратной реализации ШИМ, для получения PWM-сигнала надо активировать модуль и задать параметры его работы. Если такой модуль отсутствует, то ШИМ можно организовать чисто программным методом, это несложно. Этот способ дает более широкие возможности и предоставляет больше свободы за счёт гибкого использования выходов, но задействует большее количество ресурсов контроллера.
Импульсные источники питания
Импульсные источники питания (ИИП) также могут использовать ШИМ, хотя существуют и другие методы. Добавление схем, которые используют накопленную энергию в катушках индуктивности и конденсаторах, после основных переключающих компонентов может значительно повысить эффективность этих устройств, в некоторых случаях превышая 90%. Ниже приведен пример такой схемы.
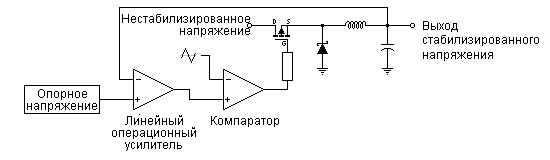 Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Рисунок 5 – Пример импульсного источника питания, использующего ШИМ
Эффективность в этом случае измеряется как мощность. Если у вас есть импульсный источник питания с КПД 90%, и он преобразует 12 В постоянного напряжения в 5 В постоянного напряжения с током 10 ампер, то на стороне 12 В он будет потреблять ток примерно 4,6 А. 10% (5 Вт) будут выделяться в виде тепла. Будучи немного шумнее, этот тип стабилизаторов будет работать намного холоднее, чем его линейный аналог.
От коэффициента заполнения к аналоговому напряжению
Номинальное напряжение ЦАП, наблюдаемое на выходе фильтра нижних частот, определяется только двумя параметрами: коэффициентом заполнения и напряжением высокого логического уровня ШИМ сигнала; на схеме это напряжение высокого логического уровня обозначено буквой A как «амплитуда». Связь между коэффициентом заполнения, амплитудой и номинальным напряжением ЦАП довольно интуитивно понятна: в частотной области фильтр нижних частот подавляет высокочастотные составляющие входного сигнала. Эквивалентом этого эффекта во временной области является сглаживание или усреднение – таким образом, посредством фильтрации нижних частот ШИМ сигнала мы извлекаем его среднее значение. Предположим, что коэффициент заполнения составляет 50% (т.е. длительность активного состояния равна длительности неактивного состояния), и мы работаем с логикой 3,3 В. Вы, вероятно, можете догадаться, какое будет номинальное напряжение ЦАП: 1,65 В, потому что сигнал половину своего времени равен 3,3 В и половину 0 В, и, таким образом, сглаженная версия окажется прямо посередине. Мы можем обобщить это следующим образом:
\
Основы импульсного преобразования
Работа подобных устройств, их ещё называют импульсными стабилизаторами (ИС), основана на ключевой стабилизации. В схеме имеется элемент, который выполняет регулировку выходных параметров за счёт своего запирания-отпирания.
В обычную трансформаторную схему входит трансформатор низкой частоты, имеющий первичную и вторичную обмотку. Импульсное преобразование тоже подразумевает наличие трансформатора, но уже высокочастотного.
Внимание! Высокочастотные импульсные трансформаторы обладают меньшими габаритами, дешевле, но их мощность выше. Импульсные преобразователи напряжения (ИПН) допускают использование схем трёх типов:
Импульсные преобразователи напряжения (ИПН) допускают использование схем трёх типов:
- повышающей;
- понижающей;
- инверторной.
ИПН обладают высоким КПД и малыми габаритами. Они включают в свой состав следующие элементы:
- блок питания (источник питания);
- ключ – элемент коммутации;
- накопитель энергии индуктивной природы – дроссель, катушка;
- диод блокировки;
- фильтр выходного напряжения – конденсатор большой емкости.
Фильтр обычно включается параллельно нагрузке.
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud)
Управление средним значением напряжения происходит путем изменения скважности импульсов
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности
Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны
Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью
Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.
Преимущество использования ШИМ — это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С. Транзисторы VT1÷VT4 реализуют подачу импульсного напряжения на двигатель постоянного тока М. С помощью обратных диодов VD1÷VD4, энергия будет отдаваться в сеть при торможении двигателя. Наличие в данной схеме четырех транзисторов дает возможность работы ДПТ во всех 4-х квадрантах механической характеристики.
Принцип работы схемы основан на двухполярной модуляции:
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
Обзор типичных схем
Регулировать вращения вала электродвигателя малой мощности можно посредством последовательного соединения резистора питания с отсутствие. Однако у такого варианта имеется очень низкий КПД и отсутствие возможности плавного изменения скорости. Чтобы избежать такой неприятности, следует рассмотреть несколько схем регулятора, которые применяются чаще всего.
Как известно, ШИМ имеет постоянную амплитуду импульсов. Кроме того, амплитуда идентична напряжению питания. Следовательно, электродвигатель не остановится, даже работая на малых оборотах.
Второй вариант аналогичен первому. Единственное отличие, что в качестве задающего генератора используется операционный усилитель. Этот компонент имеет частоту 500 Гц и занимается выработкой импульсов, имеющих треугольную форму. Регулировка также осуществляется переменным резистором.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Работая с цифровой информацией, микроконтроллер может формировать на выходах или 100% высокий или 0% низкий уровень напряжения. Но для эффективного управления нагрузкой такое напряжение на выходе нужно изменять. Например, когда осуществляется регулировка скорости вращения вала мотора или при изменении яркости светодиода.
Вопрос решают ШИМ контроллеры. То есть, 2-хуровневая импульсно-кодированная модуляция — это серия импульсов, характеризующаяся частотой 1/T и либо шириной Т, либо шириной 0. Для их усреднения применяется передискретизация. При цифровой ШИМ прямоугольные подимпульсы, которыми и заполнен период, могут занимать любое место в периоде. Тогда на среднем значении сигнала за период сказывается лишь их количество. Так как процесс осуществляется на частоте в сотни кГц, можно добиться плавной регулировки. ШИМ контроллеры решают эту задачу.
Можно провести следующую аналогию с механикой. Когда маховик вращается при помощи двигателя, при включенном двигателе маховик будет раскручиваться или продолжать вращение, если двигатель выключен, маховик будет тормозить из-за сил трения. Однако, если движок включать/выключать на несколько секунд, вращение маховика будет держаться на определенной скорости благодаря инерции. Чем дольше период включения двигателя, тем быстрее раскрутится маховик. Аналогично работает и ШИМ модулятор. Так работают ШИМ контроллеры, в которых переключения происходят в секунду тысячи раз, и частоты могут достигнуть единиц мегагерц.
Использование ШИМ-контроллеров обусловлено их следующими преимуществами:
- стабильностью работы;
- высокой эффективностью преобразования сигнала;
- экономией энергии;
- низкой стоимостью.
Получить на выводах микроконтроллера (МК) ШИМ сигнал можно:
- аппаратным способом;
- программным способом.
В каждом МК есть встроенный таймер, генерирующий ШИМ импульсы на определённых выводах. Это аппаратный способ. Получение ШИМ сигнала при помощи команд программирования более эффективно за счет разрешающей способности и дает возможность задействовать больше выводов. Но программный способ вызывает высокую загрузку МК, занимая много памяти.
Принцип шим-регулятора
Работа ШИМ регулятора сложностью не отличается. ШИМ-регулятор — устройство, выполняющее такую же функцию, что и традиционный линейный регулятор мощности (то есть, меняет напряжение или ток за счёт силового транзистора, рассеивающего значительную мощность на себе). Но ШИМ-регулятор отличается намного большим КПД. Достигается это благодаря тому, что управляющий силовой транзистор функционирует в ключевом режиме (либо включен, тогда пропускает большой ток, но мало падение напряжения, либо выключен — ток не проходит). В результате на таких силовых транзисторах мощность практически не рассеивается и энергия впустую не тратится.
После силового транзистора напряжение выходит как прямоугольные импульсы с изменяющейся скважностью в зависимости от необходимой мощности. Но сигнал нужно демодулировать (то есть, выделить среднее напряжение)
Этот процесс происходит или в самой нагрузке (когда она индуктивного характера) или если между нагрузкой и силовым каскадом располагают фильтр нижних частот.
Пример использования шим регулятора
Самый простой пример использования регулятора напряжения ШИМ — ШИМ микросхема NE555, с которой знаком каждый радио-любитель. Благодаря ее универсальности можно конструировать самые разнообразные детали: от простейшего одновибратора импульсов с 2 в обвязке до модулятора, состоящего из большого числа компонентов. ШИМ регулятор напряжения имеет широкую область применения — это схемы регулировки яркости светодиодов и лент, а также регулировка скорости вращения движков.
Принцип действия ШИМ
Принцип действия ШИМ, как указывает на это само название, заключается в изменении ширины импульса сигнала. При использовании метода широтно-импульсной модуляции, частота сигнала и амплитуда остаются постоянными. Самым важным параметром сигнала ШИМ является коэффициент заполнения, который можно определить по следующей формуле:
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Также можно отметить, что сумма времени высокого и низкого сигнала определяет период сигнала:
где:
- Ton — время высокого уровня
- Toff — время низкого уровня
- T — период сигнала
Время высокого уровня и время низкого уровня сигнала показано на нижнем рисунке. Напряжение U1- это состояния высокого уровня сигнала, то есть его амплитуда.
На следующем рисунке представлен пример сигнала ШИМ с определенным временным интервалом высокого и низкого уровня.
Генератор ШИМ сигнала с изменением скважности
- ARDUINO Контроллеры
- Расширения
- Корпуса шнуры блоки
- WeMos
- Teensy
- DfRobot
- LilyPad
- Pycom
Raspberry PI
- Модули
Расширения
Блоки питания
Карты памяти
Корпуса
Радиаторы и вентиляторы
Периферия
Переходники
Onion Omega
- Модули
Расширения
Конструкторы
Одноплатники
- NVidia
Beaglebone
Banana
Cubieboard
NanoPi
STM32 и STM8
- STM32
Discovery
Nucleo
STM8
Питание
- Преобразователи DC-DC повышающие
DC-DC понижающие
DC-DC универсальные
AC-DC
Аккумуляторы
Зарядные устройства
Контроллеры заряда
Платы контроля BMS
Лабораторные
Разъемы питания
Солнечные панели
Maynuo
Батарейки
DC-AC
TRACO POWER
Отсеки батарейные
Трансформаторы
Моторы
- Шаговые
С редуктором
С энкодером
Бесщеточные
Сервоприводы
Актуаторы
Помпы
Муфты
Постоянного тока
Драйверы и ШИМ
- Драйверы
ШИМ регуляторы
Тиристорные регуляторы
Беспроводные
- WiFi
Bluetooth
Радиопередатчики
GPS
GSM
LoRa
Датчики
- Ориентации
Влажности
Температуры
Давления
Объема
Расстояния
Слежения
Напряжения и тока
Уровня воды
Газов
Веса
Холла
Цвета и света
Движения
Касания
Обнаружения
Программирование
- Программаторы
Переходники
Разработка
Преобразователи
- Интерфейсов
Уровней
Диагностические
ЦАП и АЦП
Дисплеи
- Графические
Символьные
Nextion
Тачскрины
Измерение
- Амперметры
Вольтметры
Осциллографы
Анализаторы
USB тестеры
Частотомеры
Тестеры
Звук
- Усилители звука
Радиоприемники
MP3 модули
Излучатели
Управление и ввод
- Реле
Термостаты
Дистанционное
Соленоиды
Кнопки и клавиатуры
Энкодеры и регуляторы
Конструкторы
- Arduino
Машинки и роботы
СМАЙЛ
МастерКит
МастерКот
3D и CNC
- 3D принтеры
CNC станки
Механика
Филамент
- ABS
PLA
PETG
Разработка
- Генераторы
Часы
RFID
Модули памяти
Камеры
Ethernet
PixyCam
Механика
Паяльное
- Паяльные станции
Паяльники
Припой
Флюсы
Газовые паяльники
Вспомогательное оборудование
Инструмент
- Клейкие ленты 3M
Отвертки
Пинцеты
Наборы отверток
Оптические приборы
Умный дом
- HIPER
HiTE PRO
Sonoff
Xiaomi
Беспаечные
- Макетные платы
Модули питания
Перемычки
Наборы
- Крепеж
Разъемы
Компоненты
Термоусадка
Книги
- Программирование
Компоненты
- Процессоры
Разъемы
Реле
Ой видимо какая то ошибка !
Вот несколько причин появления ошибки
Запрошенной Вами страницы больше не существует, либо она была перемещена.
При вводе адреса Вы могли допустить ошибку.
Еще можно перечитать свой гороскоп на сегодня, может там что то есть об этом
Системы управления микросхемами
Важно знать не только из чего состоят микросхемы шим — контроллеров, но и какие существуют виды самих систем. В настоящее время доступно две основных системы широко — импульсной модуляции в которых шим — контроль принимает активное участие
Вот их некоторые особенности:
Цифровая система. В цифровой шим — системе все существующие процессы описываются цифровыми данными. Так на выходе в цифровом формате формируется показатель уровня напряжения. Заметим, что уровень напряжения может быть высокий (измеряется как 100%) и низкий (0%). Однако показатели напряжения, благодаря современным технологиям, можно изменять
Как? Необходимо изменить скважность импульсов. Только тогда изменится и напряжение
Любые совершенные перемены имеют свою частоту. Именно шим — контролёры регулируют описанные процессы. С их помощью вся система будет успешно работать. Эта специальная микросхема по праву называется сердцем всей цифровой системы шим — модуляторов.
А вот получить на выходе нужный сигнал можно как с программным, так и аппаратным методом.
Аппаратный метод. Получение сигнала этим способом происходит с помощью специального таймера, который изначально встроен в цифровую систему. Такой таймер генерирует или способствует включению импульсов на определённых этапах вывода сигнала.
Программный метод. В этом случае получения сигналов происходит посредством выполнения специальных программных команд. У программного способа больше возможностей, нежели у аппаратного. В то же время использования этого метода получения сигналов может занять много памяти.
А что можно сказать о «сердце системы». У шима — контролёра, который активно применяется в цифровых модуляторах есть свои преимущества. Стоит помнить о следующих:
- Низкая стоимость.
- Стабильная работа.
- Высокая надёжность.
- Возможность экономить энергию.
- высокая эффективность преобразования сигналов.
Все перечисленные преимущества делают цифровую систему более востребованной среди потребителей.
Аналоговый модулятор. Принцип работы аналогового модулятора в корне отличается от принципа работы цифрового Вся суть работы такого модулятора состоит в сравнении двух сигналов. Эти сигналы отличаются между собой порядком частоты. Операционный усилитель — это главный элемент аналогового модулятора, который отвечает за сравнение сигналов. Сравнение сигналов осуществляется на выходе. В качестве сравнения усилитель используется два сигнала. Первый — пилообразное напряжение высокой частоты. Второй сигнал — низкочастотное напряжение. После сравнения на свет появляются импульсы прямоугольной формы. Длительность импульсов напрямую зависят от модулирующего сигнала.
Шим — контроллер в импульсных блоках питания
Многие электрические приборы сегодня оснащены специальными блоками питания. Эти блоки помогают преобразить один вид напряжения в другой. В процессе преобразования энергии принимают участия два устройства:
- Импульсный блок питания.
- аналоговые трансформаторные устройства.
В этой статье мы больше внимания обратим на первое устройство, так как именно в нём используется шим — контролёр.
Как работает инвертор?
ВЧ модуляцию, можно сделать тремя способами:
- частотно-импульсным;
- фазо-импульсным;
- широтно-импульсным.
На практике применяется последний вариант. Это связано как с простотой исполнения, так и тем, что у ШИМ неизменна коммуникационная частота, в отличие от двух остальных способов модуляции. Структурная схема, описывающая работу контролера, показана ниже.
Структурная схема ШИМ-контролера и осциллограммы основных сигналов
Алгоритм работы устройства следующий:
Генератор задающей частоты формирует серию прямоугольных сигналов, частота которых соответствует опорной. На основе этого сигнала формируется UП пилообразной формы, поступающее на вход компаратора КШИМ. Ко второму входу этого устройства подводится сигнал UУС, поступающий с регулирующего усилителя. Сформированный этим усилителем сигнал соответствует пропорциональной разности UП (опорное напряжение) и UРС (регулирующий сигнал от цепи обратной связи). То есть, управляющий сигнал UУС, по сути, напряжением рассогласования с уровнем, зависящим как от тока на грузке, так и напряжению на ней (UOUT).
Читать также: Проверка емкости аккумулятора мультиметром
Данный способ реализации позволяет организовать замкнутую цепь, которая позволяет управлять напряжением на выходе, то есть, по сути, мы говорим о линейно-дискретном функциональном узле. На его выходе формируются импульсы, с длительностью, зависящей от разницы между опорным и управляющим сигналом. На его основе создается напряжение, для управления ключевым транзистором инвертора.
Процесс стабилизации напряжения на выходе производится путем отслеживания его уровня, при его изменении пропорционально меняется напряжение регулирующего сигнала UРС, что приводит к увеличению или уменьшению длительности между импульсами.
В результате происходит изменение мощности вторичных цепей, благодаря чему обеспечивается стабилизация напряжения на выходе.
Для обеспечения безопасности необходима гальваническая развязка между питающей сетью и обратной связью. Как правило, для этой цели используются оптроны.
Когда вам не хватает ЦАП
Даже в наш век высокоинтегрированных микросхем смешанных сигналов нередко можно встретить микроконтроллер, в котором нет цифро-аналогового преобразователя. Программируемая логика в этом отношении еще более проблематична; я никогда не слышал об FPGA или CPLD с модулем ЦАП. И даже когда микроконтроллер имеет ЦАП, доступно может быть только один или два канала – в отличие от встроенных периферийных устройств АЦП, которые обычно включают в себя мультиплексор, который позволяет одному модулю АЦП преобразовывать аналоговые сигналы, подключенные к нескольким, или, может быть, даже к десятку выводов портов. Итак, что вы должны делать, когда найдете микроконтроллер, который идеально подходит для вашего приложения, за исключением того, что у него нет встроенного ЦАП? Ну, самый очевидный вариант – использовать внешний ЦАП. Быстрый поиск в интернете показывает, что у вас на выбор есть как минимум тысяча моделей, некоторые из которых стоят меньше доллара и поставляются в крошечных корпусах SC70, MSOP, SOT или DFN. Но бывают случаи, когда вы не хотите добавлять в проект еще один чип. Возможно, в вашем микроконтроллере нет трех неиспользуемых выводов, которые вам понадобятся для связи по SPI; возможно, вы спешите и не хотите платить за срочную доставку; может быть, вам нужно шесть отдельных выходов ЦАП, но для шестиканального устройства недостаточно места на плате. В любом случае, если внешний ЦАП просто исключен, у вас есть альтернатива.