Приложение для управления квадрокоптером
Содержание:
- Особенности «сима»
- Прежде чем выбирать симулятор
- The Drone Racing Racing Simulator
- Общая информация о системе (System Status)
- Как подключить телефон к камере квадрокоптера Syma X5SW
- Как подключить квадрокоптер к смартфону
- Запуск софта
- Главные настройки управления (Main Controller Settings)
- 10. Litchi для дронов DJI (особое внимание)
- 9. Verifly
- Управление квадрокоптером (дронами), что это такое? Новая профессия
- Настройки пульта управления (Remote Controller Settings).
- Настройка и запуск ardupilot
- Несколько лучших приложений для дронов/квадрокоптеров на Android
- Что дальше?
- FPV Freerider
- LiftOff
- Общие настройки (General settings)
Особенности «сима»
Приложение Syma понадобится установить владельцам моделей X5SW, X5HW, X5C-1 и X8W. Именно они снабжены устройствами для FPV.
Среди разработок компании нет беспилотников, которые поставляются с пультом, обладающим достаточно хорошим экраном для воспроизведения видео. Для трансляции понадобится собственный смартфон владельца коптера.
Чтобы освободить руки пилота, в комплект поставки входит удобный зажим для мобильного устройства, который крепится прямо на антенну пульта управления. При включении контроллера и беспилотника создается канал Wi-Fi, к которому нужно подключить телефон.
Конфигурацией дронов «Сима» ввиду их низкой стоимости не предусмотрена поддержка связи со спутниками GPS, которая присутствует на профессиональных квадрокоптерах. Поэтому существует некоторое отклонение от курса, а также задержки передачи видео.
Однако, видео может отставать от движения беспилотника не более, чем на 1 секунду, так что этот недочет не сильно сказывается на работе устройства.
Прежде чем выбирать симулятор
Для начала нужно выбрать аппаратуру управления.
Конечно, вы можете использовать джойстик от игровой приставки или даже клавиатуру! Однако, я настоятельно рекомендую использовать аппаратуру управления моделями, это позволит получить максимум от тренировок и поможет развить моторную память.
![]()
Есть два варианта подключения аппаратуры управления к компьютеру:
- некоторые пульты управления работают с симуляторами прямо из коробки, а есть и такие, которым требуется специальный адаптер.
- можно подключить любой передатчик к симулятору через полетный контроллер и приемник
Вот список популярных передатчиков для гоночных коптеров, они совместимы со всеми симуляторами, которые будут описаны в этой статье. Это не полный список, но в нем указаны все самые популярные модели.
| Аппаратура | Адаптер для симулятора | |
|
Jumper T16 (обзор) Купить на:
|
Не требуется | |
| Nirvana (обзор, англ) | Не требуется | |
|
X-Lite (обзор).
Купить на: |
Не требуется | |
|
Taranis Q X7 (обзор)Купить на: Horus X10 (обзор) |
Не требуется | |
| Не требуется | ||
| Flysky (руководство по выбору аппы от FlySky) | ||
| Spektrum & Futaba |
![]()
The Drone Racing Racing Simulator
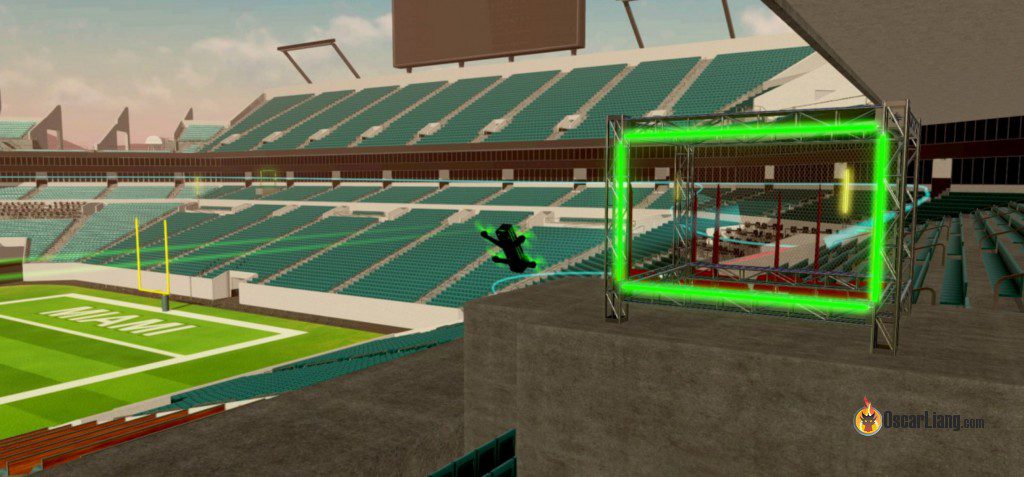
Очень интересный симулятор, в нем проводятся соревнования, и пилоты могут выиграть оплачиваемый контракт на участие в реальных соревнованиях.
Физика не самая точная, но сильно улучшена по сравнению со старой бесплатной версией. Они улучшили поведение при разворотах, но квадрикам всё ещё не хватает мощности. По ощущениям получается, что летишь на очень тяжелом коптере с мелкими моторами (дополнение: по всей видимости DRL сделали модели на основе реально существующих и участвующих в их гонках, там вес коптера более 1 кг).
Несмотря на все это, карты и сцены — вероятно одни из лучших среди всех симуляторов. Высокие здания, верфь, заброшенные фабрики и т.д. — все это на одной карте! Еще одна отличная фишка — можно перезапускать гонку прямо с аппы управления — и это действительно удобно.
Очень понравился новый режим, в котором вы будете соревноваться с призраком-пилотом примерно вашего уровня. Система мотивирует продолжать игру, совершенствовать свои навыки.
Тут я летаю между зданий, пробую одну из трасс…
Общая информация о системе (System Status)
Если вы нажмете на кнопку Flight mode, то появится один из трех сигналов: красный, желтый и зеленый.
- Зеленый сигнал — GPS соединение сильное и можно лететь безопасно.
- Желтый сигнал — можно лететь, но вероятно, что вы можете потерять управление дроном.
- Красный сигнал — дрон не может лететь.
Если вы нажмете на Overall status, то появятся режимы для настройки:
Compass — компас помогает вашему дрону ориентироваться на местности. Когда вы взлетаете из нового места, то компас нужно калибровать
Обратите внимание на то, что на компасс могут влиять электромагнитные поля
IMU (Inertia Measurement Unit) — это барометр и гироскоп, с помощью них можно видеть высоту, а также угол полета дрона. Если в приложении всплывает сообщение, что нужно откалибровать IMU, то обязательно сделайте это, следуя инструкции на экране.
ESC (Electronic Speed Control) Status — это управление вашими моторами. Если возникла проблема с моторами, то вы получите уведомление на экране о том, что их нужно настроить. Если после настройки, уведомление не исчезло, то необходимо отдать дрон на диагностику в сервисный центр.
Vision Sensors — это режим настройки сенсоров, которые обнаруживают препятствие во время полета. Рекомендуется, чтобы этот режим был включен постоянно.
Obstacle Detection Status — это визуальное предупреждение, которое всплывает на экране, когда поблизости обнаружено препятствие.
Battery Level Indicator — Индикатор уровня заряда батареи
Здесь вы видите время которое дрон может находится в воздухе до полного разряда батареи. При уменьшении заряда, цифры времени будут приближаться к левому краю и как только достигнут белой точки — дрон будет напоминать о разрядке батареи и активируется функция “возврат домой” (RTH).
Она отключится только, если вы отключите ее вручную. Желтая буква H означает точку возврата домой и движется по линии, показывая сколько заряда нужно дрону, чтобы вернуться домой.
Режим полета (Flight Mode)
- P-mode: в режиме позиционирования все сенсоры дрона активированы. Это самый безопасный режим для полета. Даже если вы отпустите стики управления, то дрон автоматически остановится.
- A-mode: если дрон потеряет сигнал GPS или сигнал будет слабый, а также если слишком темно для системы обзора, то автоматически включится этот режим. Дрон не будет сохранять высоту, но будет медленно двигаться.
- S-mode: при спортивном режиме ваш дрон может лететь с максимальной скоростью используя сигнал GPS для позиционирования.
Как подключить телефон к камере квадрокоптера Syma X5SW
В качестве примера рассмотрим методику подключения смартфона к видеоаппаратуре коптера Syma X5SW. Камера этой машины способна снимать видео в формате 640×480 pix при 30 fps. Фотографии имеют то же разрешение. Связь с установленным на кронштейне ПДУ смартфоном поддерживается через антенну встроенного в видеоаппаратуру wi-fi передатчика.
Дрон может улетать от пульта управления на 120 м, но трансляция видео прерывается уже на дальностях в 30-40 м. Производитель утверждает, что передача видео выполняется в реальном масштабе времени. Опыт показывает, что это утверждение ошибочно. В видеоканале присутствуют явные временные задержки.
Теперь рассмотрим собственно процедуру привязки
Прежде всего, пилот должен скачать на свой смартфон приложение SYMA FPV. Соответствующий QR-код приложения можно найти на упаковке дрона или в инструкции к нему. Код зависит от того, под управлением какой операционной системой работает смартфон – ОС iOS или Android. Владельцы телефонов с ОС Android могут столкнуться с весьма неприятной проблемой – приложение Syma FPV поддерживается только версиями Android 4.1 или выше.
Если установка программы произошла, оператор может включить дрон и заняться его привязкой. На создание собственной точки доступа полетной камере понадобится до 30 секунд, после чего оператор может начинать процедуру подключения к телефону. Он выбирает в своем смартфоне меню настроек, находит в нем раздел wi-fi и самостоятельно подключается к сети, которая значится в открывшемся на экране списке под именем FPV wi-fi.
Если появилось сообщение об успешном завершении операции, пилот выходит из меню настроек, находит в общем списке программ приложение SYMA FPV и открывает его. Появляется заставка, на которой нужно нажать кнопку START. Реакцией на эти действия станет появление на экране живого изображения, поступающего по каналу wi-fi от бортовой камеры дрона.
На этом фоне размещаются пять иконок, благодаря которым оператор получает право записывать фото и видео, просматривать полученные результаты в памяти телефона, контролировать уровень сигнала wi-fi и входить из приложения. В левом нижнем углу экрана располагается индикатор, фиксирующий продолжительность видеозаписи.
Как подключить квадрокоптер к смартфону
Все модели беспилотных летательных аппаратов, исключение составляют простые детские коптеры, производители укомплектовывают многофункциональным пультом управления. На нем имеются дополнительные крепления для гаджета.
Как подключить квадрокоптер к телефону? Устройство надо вставить в нужные крепления. В App Store или Google Play скачать фирменную утилиту для беспилотного летательного аппарата. Установить приложение и запустить при включенном пульте. Далее все делать по инструкции. После запуска она выводится на дисплей. Затем в соответствии с личными потребностями осуществляют отладку программы (это процесс поиска и устранения ошибок в программном обеспечении).
Подключиться к коптеру возможно лишь после того, как будет установлен Wi-Fi. О том, что процесс успешно завершен, можно узнать из выведенного утилитой сообщения. После чего беспилотник запускают со смартфона.
Подключение и настройку выполняют следующим образом. С телефона на Android или на iOS нужно скачать программу для управления дроном, активировать поиск Wi-Fi и включить коптер. Проверить исправна ли техника. Затем надо запустить модуль беспроводной связи. К источнику сигнала Wi-Fi в настройках телефона необходимо подключить мобильное устройство, открыть приложение, которое было установлено раньше.
Запуск софта
Сначала ставим Docker и пакеты Python.
| 1 | sudo apt install python-wstool python-catkin-tools-y |
Качаем образ и софт.
|
1 |
export FASTSENSE_WORKSPACE_DIR=/home/urock/work/px4 cd$FASTSENSE_WORKSPACE_DIR mkdir-pcatkin_ws/src# Сюда будем клонировать ROS модуль управления mkdir-pFirmware# Тут будет скомпилирован код PX4 в режиме sitl cd catkin_ws/src git clonegit@github.comFastSense/px4_ros_gazebo.git. wstool init.# Создает ROS workspace |
Собираем образ.
|
1 |
сdcatkin_ws/src docker build.-tx_kinetic_img# x_kinetic_img — имя создаваемого образа |
Скачиваем и компилируем код PX4 в режиме sitl внутри образа Docker.
|
1 |
сdcatkin_ws/src ./docker/docker_x.sh x_kinetic_img make_firmware ## После компиляции должно открыться окошко Gazebo с дроном, лежащим на асфальте docker rm$(docker ps-a-q) |
Симуляция в Gazebo
Запускаем контейнер в режиме bash, компилируем и запускаем тест.
|
1 |
сdcatkin_ws/src ./docker/docker_x.sh x_kinetic_img bash cd/src/catkin_ws/ catkin build source devel/setup.bash# Это надо сделать только после первой сборки roslaunch simple_goal simple_goal.launch |
Ты должен увидеть такое же окошко Gazebo, в котором дрон начнет летать. В консоли ты получишь вот такой вывод:
|
1 |
INFO1577108810.425081938,19.404000000FCUARMED by Arm/Disarm component command INFO1577108811.792807760,20.660000000FCUTakeoff detected |
Тест должен закончиться так.
|
1 |
Testcasetest_posctl…ok ————————————————————- SUMMARY *RESULTSUCCESS *TESTS1 *ERRORS *FAILURES |
На ошибки вроде этой не обращай внимания, их выдает PX4 по неизвестной мне причине.
| 1 | ERROR1577108798.707247440,7.804000000ODOMExCould notfindaconnection between’local_origin_ned’and’fcu’because they are notpart of the same tree.Tf has two ormore unconnected trees. |
Для завершения процесса нажимай Ctrl-C.
Посмотрим на код
Мой репозиторий Fast Sense основан на материалах команды, которая разработала PX4 — самый популярный опенсорсный полетный контроллер в мире.
У этих ребят есть своя инструкция по запуску в Docker, а на их гитхабе ты найдешь код модуля автономного управления, который я перенес в свой репозиторий, чтобы все находилось в одном месте.
Код управления на Python совсем небольшой, я уверен, ты сможешь в нем разобраться самостоятельно. Я лишь скажу, что начинать надо с чтения функции . В ней описана логика полета: дрон переводится в режим , затем армится, взлетает и начинает полет по точкам .
После чего садится и дисармится.
Главные настройки управления (Main Controller Settings)
Настройка точки возврата домой (Home Point Settings): здесь вы можете настроить точку возврата дрона домой. Это может быть либо место, с которого дрон поднимался, либо место, с которого пилот запускал дрон.
Высота полета в режиме возврата домой (RTH Altitude)
Здесь устанавливается высота, на которой дрон будет возвращаться домой.
Режим управления “начинающий”: этот режим настроен по умолчанию. При таком режиме дрон начнёт взлет только, если сигнал GPS будет хорошим. Также скорость, расстояние и высота будут ограничены. Этот режим позволяет начинающему пилоту безопасно освоить управление. Как только управление дроном освоено, этот режим можно выключить.
Режим управления на продвинутом уровне (Advanced Controller Settings)
Инструкция по установке основных параметров управления “вручную” (DJI GO 4 Manual Main Controller Settings)
Эта функция позволяет настроить чувствительность стиков управления. Чем выше чувствительность, тем быстрее дрон реагирует на изменения положения стиков.
Экспоненциальная кривая EXP (Exponential Curve)
Экспоненциальная кривая (EXP) отражает взаимодействие между стиками и дроном. Ось Х показывает уровень нажатия на стик, а Ось Y показывает уровень отклика дрона на это нажатие, основанный на настроенной EXP кривой. (эта настройка недоступна на DJI Spark).
Чувствительность стиков (Sensitivity)
В этом разделе приложения вы можете настроить чувствительность стиков управления.
Реакция дрона (Attitude): здесь можно настроить как быстро дрон будет реагировать на ваши действия.
Тормоз (Brake): это управление тормозной системой. Можно настроить как быстро дрон затормозит в режиме подключения к GPS. Чем выше значение, тем более резким будет торможение.
Цель (Gain)
В этих настройках отображается как быстро дрон сможет реагировать на внешние погодные изменения, например, ветер. Рекомендуется не менять эти настройки, если вы не профессиональный пилот. Эти настройки влияют на поведение дрона в небе. Если настроить их неправильно, то дрон будет вести себя непредсказуемо во время полета.
10. Litchi для дронов DJI (особое внимание)
Цена: 24,99 доллара США
Мы все знаем, что вам нужны официальные приложения DJI GO, DJI GO 4 и DJI Fly, чтобы управлять вашими любимыми дронами DJI, верно? Неправильный! Есть несколько альтернативных приложений, которые могут управлять вашим дроном DJI Mavic Pro, DJI Spark, DJI Phantom и другими, лучшими из этих приложений, которые мы пытались найти на Litchi. Полное название приложения длинное, но объясняет большую часть его функций. Litchi для DJI Mavic/Phantom/Inspire/Spark — это надежное приложение, которое поддерживает те же ощущения, что и приложения DJI, но работает немного иначе. В принципе, если вы хотите, если вы ищете лучшее из приложения DJI, а также несколько новых удовольствий, Litchi стоит вашего внимания. Полеты по путевым точкам и встроенная функциональность VR/FPV — ключевые факторы, которые привлекли меня в Litchi. Такие богатые возможности и функции всегда у вас под рукой благодаря действующей цене в 24,99 доллара за приложение, что может быть больше, чем многие могут подумать.
Загрузка опроса
Здесь собраны все лучшие дроны, или ознакомьтесь с нашим мастером Drone Rush список дронов! Вы также можете ознакомиться с множеством других наших материалов, связанных с дронами, ниже:
- Регистрация FAA
- Дроны до 500 долларов
- Лучшие гоночные дроны
- Лучшие приложения для дронов
Обучение пилотов-дронов | Руководство по началу работы с дроном | Производители дронов
9. Verifly
Цена: бесплатно
Страхование. Нравится это вам или нет, но страхование — важная часть современной жизни. В отличие от страховки вашего автомобиля или дома, по которой вы платите ежемесячный взнос, Verifly делает что-то другое — страхование по требованию. Идея проста: ваши полеты, особенно коммерческие, либо слишком малочисленны, либо слишком разбросаны и непредсказуемы, чтобы обеспечить полное страхование. Verifly позволяет вам регистрировать время начала и окончания, а затем просто платить за то, что вы используете. Цена начинается от 10 долларов в час. Нажмите кнопки загрузки ниже, чтобы увидеть более подробную информацию о фактическом покрытии. Политики подписаны Global Aerospace, Inc.
Управление квадрокоптером (дронами), что это такое? Новая профессия
Управление квадрокоптером и дроном – это специальное устройство для манипуляции данным аппаратом. Как уже говорили выше, используется специальный пульт управления, чтобы управлять квадтрокоптерами и дронами (скрин 3).
Управлять аппаратами можно не только пультом, но и мобильным телефоном, планшетом. Только для этого нужно приложение.
Появилась новая профессия на рынке труда – управление квадрокоптерами. В этой деятельности специалисты работают операторами дронов и квадрокоптеров. Они подготавливают аппараты к полету, совершают полеты удаленно, оформляют необходимую документацию и выполняют другие обязанности. Чтобы работать и зарабатывать деньги в этой деятельности, необходимо учиться управлению квадрокоптерами. Об этом мы будем говорить далее.
Настройки пульта управления (Remote Controller Settings).
Здесь вы можете настроить пульт управления.
- Калибровка пульта управления Remote Controller Calibration: здесь можно настроить управление стиками и переключатели. Вы сможете делать настройки только когда дрон выключен. Чтобы настроить, следуйте инструкциям на экране.
- Режимы стиков Stick Mode: здесь вы можете настроить режимы управления стиками: Режим 2 — встроенный режим, контролирующий как пульт управления, так и виртуальные джойстики.
- Настройка постоянной скорости Set to Fixed-Wing Mode: при включении этой функции, дрон будет лететь вперед автоматически на заданной скорости. Чтобы взлететь, поднимите левый стик вверх. Для посадки опустите его вниз. Направляйте стик вправо, влево, чтобы менять положение дрона.
Обзор функций на экране Remote Controller LCD Screen Introduction: на этом экране показан краткий список функций. Пока это доступно только на модели DJI Mavic Pro.
Пользовательская настройка кнопок Button Customization: вы можете настроить кнопки С1 и С2 под те функции, которые необходимы вам.
Включение и выключение передних светодиодов у квадрокоптеров DJI Turn on/off Front LEDs: для того, чтобы при фотографировании избежать бликов передние светодиоды можно выключить.
- Автофокус AF Lock/Unlock: функция включения/выключения автофокуса
- Особые настройки камеры Advanced camera: быстрый доступ к настройкам ISO, Shutter, и EV.
- Настройка угла камеры Camera Forward/Down: вы можете переключить положение камеры с положения вперед до угла 90°.
- Кнопка для отображения карты Toggle map/live: при нажатии этой кнопки, на весь экран раскрывается карта.
- Удаление маршрута полета Clear flight route function: вы можете удалить с карты полета маршрут, который дрон уже пролетел.
- Информация об аккумуляторе Battery info: показывает напряжение и уровень заряда, которые остались в батарее.
- Воспроизведение Playback: вы можете просмотреть фото и видео, которые уже сняты.
- Центр автофокусировки Centre Auto Focus: вы можете настроить фокус в центре кадра.
- Правый циферблат ISO / Управление затвором Right Dial ISO/Shutter Control: здесь можно настроить функцию правого циферблата (настройка ISO или управление затвором)
5D Режим настройки кнопок 5D Button Customization
Вы можете использовать функцию 5D джойстиков при управлении квадрокоптером DJI Mavic Pro:
- Обзор камеры Вперед/Вниз: изменение положения камеры с обзором “вперед” и до 90° вниз.
- Режим приближения изображения Zoom In: позволяет камере увеличивать изображение.
- Режим отдаления изображения Zoom Out: позволяет камере отдалять изображение.
- Режим Портрета Portrait Mode: позволяет камере вращаться до вертикального положения.
- Фокусировка / Измерение Focusing/Metering: позволяет в ручном режиме переключать между фокусом и измерением.
- AE блокировка AE Lock: в режиме съемки фото блокирует фокус и экспозицию.
Другие настройки Other Settings
Вид управления пультом Remote Controller Type: вы можете настроить управление в режиме двух пультов — главный и дополнительный.
Подключение пульта управления Linking Remote Controller: эта кнопка подключает пульт к квадрокоптеру.
Настройка и запуск ardupilot
Релизы новых версий Ardupilot немного запаздывают в сборке от Emlid. Если необходимый функционал доступен в самой последней версии, то установить ее из исходников можно
Разработчики Navio добавили в свою сборку простую и удобную утилиту Emlid tool для проверки датчиков и настройки Ardupilot. Сначала проверим, видит ли Raspberry контроллер Navio:
Если в ответ на эту команду выдает что-то вроде:
значит видит. Проверим состояние датчиков (покажет список и состояние):
и драйвера ШИМ-контроллера в ядре Linux:
0 = не работает, 1 = работает.
Прошивка ШИМ-контроллера обновляется так:
Теперь настроим Ardupilot:
В терминале откроется текстовый GUI с пошаговыми менюшками. Выбираем copter последней версии, тип
arducopter
, автозапуск при включении (
On boot: enable
), старт после настройки (
Ardupilot: start
Выходим через пункт меню Quit.
Проверим запустился ли Ardupilot:
Обратите внимание, файл запуска в systemd называется
arducopter
, так как настроен был вариант
copter
Теперь нужно настроить Ardupilot так, чтобы он отправлял нам телеметрию. Для этого отредактируем файл конфигурации:
В нем должны быть такие строки:
Сохраняем файл (
Ctrl X
, затем
Y
) и перезапускаем Ardupilot:
Проверить состояние процесса Ardupilot можно такой командой:
С такими настройками Ardupilot будет транслировать телеметрию (пакеты
) в локальный UDP-порт 14550. Далее, скрипт
(описание ниже) будет забирать оттуда телеметрию и передавать в GCS или скрипт, а также отправлять в обратном направлении пакеты с командами.
Вместо локального адреса и порта можно записать IP-адрес ПК или планшета в локальной сети и пакеты будут транслироваться сразу туда.
Однако, такой подход оправдан, если данные телеметрии больше нигде не используются и у устройства с GCS статический IP адрес. Иначе каждый раз в настройках Ardupilot придется прописывать новый. Чтобы общаться с автопилотом по TCP могли одновременно несколько GCS с динамическими адресами и еще какие-нибудь скрипты на самом бортовом компьютере, удобнее использовать MAVProxy.
Этот скрипт (написан на Python) может получать пакеты MAVLink на локальный UDP-адрес и ретранслировать их на несколько локальных или удаленных IP-адресов как по UDP, так и по TCP. Пакеты передаются в обоих направлениях Ardupilot ⇔ GCS. Кроме того, MAVProxy представляет из себя полноценную GCS, но с текстовым интерфейсом.
Несколько лучших приложений для дронов/квадрокоптеров на Android
Чтобы летать на своем квадрокоптере, а также подключить к нему мобильное устройство, вам понадобится несколько приложений, но что именно вы должны скачать? Шансы на то, что производитель беспилотника будет включать в себя соответствующее приложение, но что еще поможет вам управлять винтом монстра?
Цели
Что вы собираетесь делать с вашим беспилотником? Возможно, вы хотите гарантировать законность, убедившись, что можете летать в том или ином месте, для этого есть приложение. Может быть, вы ищите службу, которая поможет отслеживать ваши полеты, есть инструмент и для этого тоже.
Google Earth
Абсолютно бесплатный сервис, дающий много полезной информации для владельца копировального аппарата. Как вы хорошо знаете, первое, что вам нужно сделать с любым беспилотным летательным аппаратом (после его регистрации), это выяснить, где он летает. На самом деле, некоторые из приложений в нашем списке связаны с беспилотником, чтобы показать вам, где безопасно летать. Безопасные места для полетов — это одно, но прежде чем вы туда доберетесь, почему бы не открыть Google Планета Земля, чтобы найти уникальные места для полетов. Google Планета Земля — это бесплатное приложение для вашего мобильного устройства, которое также доступно в Интернете.
Аэрокосмос
Airmap — один из тех инструментов, который делает гораздо больше, чем просто отображение потенциального местоположения или помогает вести журнал полетов. При поддержке таких компаний, как Microsoft и Qualcomm, не говоря уже о таких беспилотных компаниях, как Yuneec, Airmap и других, они быстро становятся де-факто инструментами для коммерческих беспилотных полетов.
Не позволяйте инструментам манипулирования беспилотниками, гео-координации и другим терминам отпугивать вас, воспользуйтесь преимуществами уведомлений о воздушном движении в реальном времени в вашем мобильном приложении. Проверьте Airmap для своих основных потребностей или общего пилотирования.
Hover
Hover — это недооцененное приложение для Android, которое обеспечивает картографию и даже информацию о местоположении, предоставляемую Airmap, а также добавляет информацию о погоде. С первого взгляда Говер может сказать, безопасно ли здесь лететь или нет
Принимая во внимание видимость, ветер, местоположение и многое другое, Говер может быть не единственным беспилотным приложением, которое вам понадобится, но если вы придерживаетесь только одного, такое приложение, как это, безусловно, пригодится. Скачать Hover на мобильном устройстве
Рассмотрим и другие предложения:
- DroneDeploy — это специальный пакет от DJI, который заменит самый современный пульт дистанционного управления;
- Pix4D — это инструмент 3D-позиционирования, не требующий никакого профессионализма;
Вы можете использовать стандартную программу GO от ведущего производителя беспилотных летательных аппаратов DJI или найти альтернативу. Разработчики программного обеспечения предлагают много отличных решений, но каждое из них нуждается в тестировании. В связи с небольшим количеством скачиваний и обзоров специализированных разработок, многие виды программного обеспечения остаются незамеченными, но они определенно стоят того, чтобы на них посмотреть.
Pix4D
Pix4D — это приложение для создания 3D моделей с помощью квадрокоптера.
Pix4D несколько похож на UgCS выше, что позволяет заранее разработать маршруты полетов и модели для вашего беспилотного летательного аппарата с помощью настольного приложения. Это очень крутой инструмент для коммерческого использования вашего квадрокоптера.
Одной из особенностей Pix4D является «пролет сетки», позволяющий создать наиболее эффективный вид объекта или области съемки.
Pix4D существуют платные и бесплатные версии этого программного пакета.
Что дальше?
Если ты заинтересовался темой программирования беспилотников, то у тебя есть масса самых разных возможностей получить подходящее образование или заниматься самостоятельно. Вот несколько советов, которые помогут сориентироваться.
- Начинать осваивать профессию программиста-робототехника можно уже со школы.
- Выбирай вуз, где есть робототехнические кафедры. Если не можешь поехать в Стэнфорд, MIT или ETH Zurich — выбирай МФТИ, Сколтех или НГТУ (наверняка есть и другие наши сильные вузы, но в этих трех я знаю сильные команды, которые занимаются дронами).
- Приходи на стажировку к нам в Fast Sense.
- Собирай команду и участвуй в хакатонах COEX — COEX World Skills.
- И задавай вопросы в комментариях или пиши мне на почту.
До встречи!
FPV Freerider
Общее о симулятора
FPV Freerider это классический FPV симулятор, который заработал призвание сообщества. Даже спустя годы после релиза, он остается популярным симулятором, которым пользуются многие пилоты. FPV Freerider был одним из первых и основных симуляторов для пилотов. Там легко можно переключаться в режимах камеры – вид от первого лица или от третьего. Также, можно выбирать и между режимов полета – можно летать в «АКРО» или в режиме «Стабилизация». Разработчики все еще продолжают поддерживать эту игру, в 2016 году они добавили возможность делать различные 3D-трюки, а также добавили новую карту. FPV Freerider это симулятор без всяких излишеств, он предназначен просто для практики и обычных полетов. Недостатками будет то, что нет многопользовательского режима и скромные настройки квадрокоптера. Современные симуляторы позволяют очень гибко и точно смоделировать свой дрон, чтобы вы практиковались как на своем. Однако, цена у симулятора всего 5$, поэтому, если вы не готовы тратить больше, то это ваш выбор.
Дополнительная информация о симуляторе
- Цена: 5$
- Уровни: 6 уровней.
- Сложность настройки и привязывания пульта управления: легко. Мы в течение нескольких минут смогли подключить и откалибровать два разных пульта.
- Мультиплеер: нет.
- Для кого рекомендуется: для новичков, которые еще не умеют летать и не хотят разбить свой дрон в первый же полет.
- Плюсы: низкая цена, рекомендация от сообщества, хорошая физика полета, простая настройка и калибровка подключаемого пульта управления.
- Минусы: маленький набор настроек, отсутствие многопользовательского режима.
Скачать FPV Freerider: https://fpv-freerider.itch.io/fpv-freerider
LiftOff

Более продвинутым пилотам я рекомендую обратить внимание на LiftOff. Это симулятор с наиболее реалистичной графикой и с самым длинными списком возможностей
Объем контента впечатляет, сотни моделей и тысячи треков, созданных энтузиастами. Первый симулятор, у которого есть система комплектующих, что позволяет менять компоненты коптера и его настройки, как в реальном мире. Хотя предстоит проделать еще очень много работы, чтобы правильно эмулировать разные части дронов.
Можно настраивать PID регуляторы и рейты, как в настоящем дроне под управлением Betaflight. За годы разработки сильно улучшена физика. Разработчик сообщил, что потратил очень много денег на написание кода на основе отзывов от «топовых пилотов», «авиационных инженеров» и «специалистов по аэродинамике».
В нашем списке Liftoff — самый прожорливый симулятор в плане ресурсов компа, чтобы картинка была плавной, нужен довольно приличный компьютер. Очень многие жалуются на рывки и что он работает медленно.
К сожалению, во время игры нельзя менять настройки физики. Кроме того, не очень хорошо работает отслеживание крашей, т.е. приходится снимать очки, тянуться к клавиатуре и перезапускать игру. Это небольшая проблема, но все равно раздражает.
Liftoff обновился и теперь упростился процесс бинда передатчика, также появился режим «Freestyle mode», в котором отслеживаются и оцениваются ваши движения и трюки, как будто это соревнование.

Вот видео моего полета в симуляторе. Таранис и очки подключены к компьютеру. Видео записано писалкой, встроенной в очки.
Общие настройки (General settings)
Единицы измерения (Measurement Units): здесь вы можете менять параметры отображаемые в приложении DJI GO 4, например скорость в км/ч, м/ч, мл/ч.
Длительное нажатие на экран: вы можете настроить эту функцию для следующих параметров:
- Контроль угла подвеса (Gimbal Control). Нажмите на экран и пальцем двигайте вверх/вниз для изменения положения подвеса.
- Установка фокуса (Focus). При длительном нажатии на экран, появляется зеленый квадрат. Здесь вы можете настроить фокус композиции.
- Прямая трансляция (Live Streaming): с помощью этой функции вы можете вести прямую трансляцию в Фейсбук и другие платформы социальных сетей. Чтобы ее включить, зайдите в свой аккаунт соц. сети и следуйте инструкциям на экране.
Карта (Map)
В настройках карты вы можете устанавливать переключатель в положение вкл. и выкл. на следующих функциях: Карта маршрута полета (Show Flight Route) и Сохранить карту полета (Cache Map in the Background). Приложение DJI GO 4 сохранит местную карту, ее не нужно будет снова загружать.
Не включайте режим Calibrate Map Coordinates (используется только для полетов в Китае).
Если эта функция включена, то видео из приложения DJI GO 4 будут сохраняться вам в телефон, а также на карту Micro SD. Вы можете установить максимально допустимый предел загрузки видео, а также настроить автоматическое удаление материала, когда место хранения заполнено максимально.
Здесь также присутствует функция записи аудио (Record Audio). Если включить эту функцию, то устройство будет записывать аудио во время видеосъемки.